©1999 Science Applications International
Corporation. All rights reserved. |
|
| Disclaimer: | The views and opinions expressed in this paper are the author's and may not represent the position of either Science Applications International Corporation or Kettle Creek Corp. |
|
1. |
Attributes of Linearity |
|
1.1 |
Linear systems, processes and actions are those in which the output is directly proportional to the input. It is linear thinking to assume that combat power is directly proportional to the number of combatants and their weapons. |
|
1.2 |
Linear actions obey the rule of additivity. If a system is perturbed by first an input A and then another input B, then the outputs of A and B summed together are identical to the output which would occur if the inputs A and B were first summed and the system were perturbed by their sum. If we drop five bombs on a building complex and then come along later and drop five more bombs, then if linearity were the rule, the result of those two bombing efforts would be the same as if ten bombs were initially dropped, assuming no intervening events. This direct additivity does not occur with non-linear actions. |
|
1.3 |
In linear actions, the ratio of output to input continues to be constant throughout the entire range of experience. We extrapolate a straight line on behavior. Therefore, if a bombing campaign were linear, then given the effects of a bombing campaign at some time t, the same effects are assumed to continue to occur if the campaign is continued in time. But are bombing campaigns really linear, as assumed? If we define them strictly in terms of rubble produced, then the answer may be yes. But if the result we seek is some diminishment in capability or resolve, then the answer is no. During WWII, the German bombing of London continued to produce more rubble, but this simply hardened their resolve, not diminished it. The same occurred during the war with Vietnam. Adaptation occurred in other ways. For example, in WWII, the Germans simply moved some of their aircraft manufacturing into caves. |
|
|
||
1.4 |
Attrition warfare is often modeled as a linear process. The "Lanchester Mechanism", for example, models attrition with two coupled equations: dB/dt = krR(t) and dR/dt=kbB(t), where in its simplest form (there are others), the kill rates are constant. Thus increasing the number of red force and blue force weapons, R and B, or increasing the red force and blue kill rates, kr and kb, by 25% is assumed to increase the rate at which attrition is extracted by a linear 25%. Actual attrition warfare, rarely strictly linear, tends to be discussed by many professionals as if it were. They describe battles as if they were contests of friendly versus adversary firepower, with the emphasis on body counts and targets destroyed. For example, those who defend the U.S battle results in Mogadishu by comparing the body counts of 18 American losses to over 500 Somali losses exemplify thinking along these linear attrition lines. With this linear thinking, the tacit although rarely stated, assumption is that 25% more firepower will produce 25% more enemy casualties. Thus, offense seeks to minimize adversary firepower by destroying it and defense seeks to avoid adversary firepower effects (evade, hide, fortify against, obscure). |
|
1.5 |
Technical Superiority - When the form of warfare employed by both sides is linear, then Technical Superiority gives a decided edge. It raises the value of the constant k in the basic equation for linearity Y = kX +b. Thus in the Battle of Crecy, the long bow gave the British a decided advantage, despite being vastly outnumbered by the French. Technical superiority as a way of obtaining decisive advantage in linear warfare works fine so long as the other sides is also employing linear warfare. Fortunately, Saddam Hussein was using linear warfare in Desert Storm, so our linear efforts paid off. However, he has since learned his lesson and has become decidedly non-linear, and the effectiveness of our efforts has dropped. |
|
1.6 |
The term "Force Multipliers" often displays linear thinking, depending on its usage. They are "…a capability that, when added to and employed by a combat force, significantly increases the combat potential of that force…"<Note 1> It appears as linearity when some form of special technical capability is employed to create the effect that is equivalent to more combatants. In this case, it invokes the rule of linear additivity in providing a greater effect as if there were more combatants engaged in the firefight. However, what we are really doing is increasing the value of k in the linear equation Y = kX +b, as described in the previous paragraph. |
2. |
Attributes of Non-linearity |
|
2.1 |
Non-linearity means that the output is not directly proportional to the input. Instead, the ratio of output to input can rapidly grow larger or can de-escalate to a miniscule value. |
|
|
||
2.2 |
Nonlinear systems do not obey the rule of additivity. The sum of inputs A and B does not equal the same result as if each of these are input individually and their results summed. |
|
2.3 |
In linear systems, emergent behavior is assumed to result from the simple addition of the interactions between agents (an agent can be a single combatant, a combat unit, an entire army). In non-linear systems the emergent behavior of the whole is greater (or could be less) than the simple addition of the interactions. In all systems, the interactions between agents become inputs to each other. Emergent behavior is simply the collective behavior that results from interactions between agents, whose individual behavior is other than the emergent behavior. For example, a single molecule of a gas may have velocity, but not temperature and pressure. But a group of interacting (colliding) molecules exhibits the collective behavior of temperature and pressure. A single brain cell doesn't think, but the interactions between the large mass of brain cells in our brain exhibits the emergent property of thought. |
|
2.4 |
Non-linear systems bifurcate into multiple states, and display many attributes that have a direct bearing on adaptation and the ability to remain unpredictable. Two extremely important concepts are bifurcation and fitness landscape. These are discussed in the following sections. |
3. |
Bifurcation |
3.1 |
Non-linear systems have the capacity to exhibit multiple stable states. This is illustrated in Figure 1 in what is termed a bifurcation diagram. The far left hand side of the diagram represents systems that are mono-stable and upon perturbation will eventually settle down to a single static or steady state condition. Just to the right of this region, the system "bifurcates". This merely means that there are two states available to the system. For one range of perturbations and conditions, the system will settle down to one state and for another range of perturbations and conditions, it will settle down to another state. As we progress towards the right, each branch splits, and then each branch further splits resulting in a rapid increase the number of stable states. On the far right hand side are those that are Chaotic. Chaotic systems appear to have an infinite number of potentially stable states. But they never settle down to any of these for long and are therefore considered to be unstable. |
3.2 |
The number of possible states that can be stable for a system is limited. The term "attractor" is used to refer to the stable state a system will move towards with time. No matter where the system starts from or is perturbed to, it will eventual settle down or drift towards a small number of these attractors. Thus the attractor is a fundamental characteristic of a dynamic system. (For chaotic systems, which don't settle down, the sum of all the states visited is called a "strange attractor"). |
|
|
3.3 |
Systems that are mono-stable or in steady state are so stable that any perturbation causes them to snap back to their stable state, leaving no opportunity for adaptation. Change requires "surgery". An example of this would be a nation that solely uses attrition warfare to achieve its aims, regardless of the perturbation and underlying conditions (e.g. nature of adversary) causing them to go to war. |
3.4 |
Figure 1 also shows an opportunistic region for adaptation. It is opportunistic precisely because there are so many states available. Many non-linear systems can be caused to bifurcate repeatedly merely by increasing the magnitude of the control parameters (see section 4). The most opportunistic portion is that immediately preceding the chaotic region (referred to as the "Edge of Chaos). The difficulty is the danger that a high amplitude perturbation (input) or change in system configuration (number of interconnections) could push the system into the chaotic region. |
3.5 |
An example of this repeated bifurcation would be the behavior of the residents of Mogadishu during the operation to seize Aidid clan leaders. <Note 3> The state of Somali citizens going about their normal daily living bifurcated upon the perturbation by our forces into those still going about daily living and those erecting barricades and lighting summoning fires. As the mission progressed, Somali citizens increasingly abandoned daily living and thronged to the scenes of action. Those with arms fired at our forces from rooftops, windows and from locations within crowds. As our forces fired back at massed crowds comprised of both armed and unarmed citizens, the mobs responded to that perturbation with yet another bifurcation. Now they stormed towards the Americans and more switched from "bearing witness" to actively helping Somali gunman take the Americans out in the increasingly intensive fire fight (e.g. using children to point out the American positions to hidden gunmen). During the various firefights, Somalis massed and dispersed, massed and dispersed (they oscillated back and forth between these two states, with scenes of action being one attractor and places of cover being another). Militia adapted to our fire by deliberately surrounding themselves with civilians and hiding their weapons under their robes. When a Somali militiaman shot down the Blackhawk with an RPG, the wreck site became another scene of action and the Somalis converged towards it. At this point they again switched state to pure revenge, hacking at and parading around with parts of the dead airmen bodies. They were in yet another state when they set up a camera crew and entered the process of ransoming the pilot off. |
3.6 |
Warfare is a "real time" system. The time it takes to settle down to a stable state, termed the transient, is also a measure of the system stability. <Note 4> Highly stable systems exhibit short transients, and snap back when perturbed. But warfare is a "real time" system in which the transient time and the operational timescale are equivalent. Attractors in this case do not persist, but are transient as well. This means the system is always moving towards a stable state (attractor), but before it gets there is perturbed towards another state. For this reason it appears to be chaotic. In war, when operations settle down to a stable state, they become predictable and are vulnerable. It is interesting to view the Somali "mass and disperse oscillation" behavior from this perspective, a situation we did not take advantage of. |
4. |
Control Parameters |
|
4.1 |
Control Parameters are the determinants of a system's state. As these are slowly varied, the system attractor structure can change, leading to a different set of stable states. Typical classes of control parameters are those that affect (e.g. filter, amplify, suppress) the inputs that perturb the system and interactions, since these become a form of input to each "agent" (a combat unit can be considered an agent). |
|
| |
|
|
4.2 |
Some nonlinear systems are able to bifurcate repeatedly all the way from the mono-stable into the chaotic region. These display the property of iterative feedback, where the output from the previous cycle is fed back in as the input to the next cycle. Since it is the value of the input that drives the system to bifurcate, this feedback can either increase the number of states or decrease it depending on whether the feedback causes the input (control parameter) to increase or decrease. |
|
4.3 |
The OODA Loop defined by John Boyd <Note 5> captures this iterative nature of warfare. It recognizes that the result of our actions is not just the direct effect on the adversary, but his adaptation to our actions, and his subsequent actions (or at least our observation of them) become part of the next input. It includes as inputs several feedback loops, as shown in Figure 2, which provide a fresh set of observations with which to re-orient. |
|
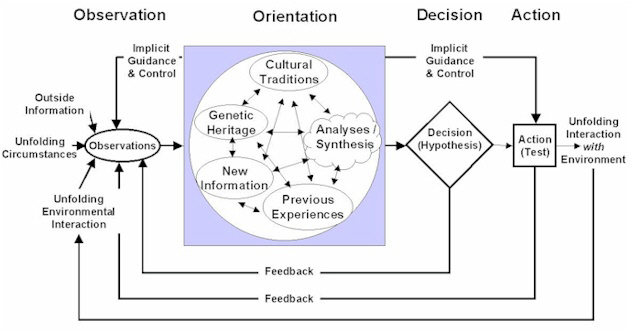 Figure 2 John Boyd's OODA Loop Depicts Adaptation At All Levels Of Warfare |
||
4.4 |
Based on the Boyd OODA Loop, it would appear that the inputs to the Observation phase are control parameters for warfare. But the real control parameter is that which determines whether there is just one, 16, or an infinity of available states. Or in other words, it is the parameter that would cause us to prefer one state under one set of conditions and another state under a different set of conditions. It would seem, then, that the actual main control parameter is Orientation, since this determines the Decision on what to do. It is the Orientation that sets the recognition for what the actual situation is and it is actually the primary input for determining what state to change to. |
|
5. |
The Fitness Landscape |
|
5.1 |
Some states provide more opportunity for success than others. This relative value is expressed by a concept called the "fitness landscape". For biological entities, the fitness landscape defines how well suited its occupants are to optimize their survival, mating, and continued evolution. In warfare, it can define how well suited its occupants are to winning tactically, operationally, and strategically. |
|
5.2 |
The fitness landscape is an "n"-dimension map that topologically represents all possible system states and rates every possible option in terms of some attribute or achievement that pertains to its optimal condition or success. To facilitate ease of understanding, fitness landscapes will be discussed herein as if they were only three-dimensional. Up is associated with higher fitness and down with lower. The occupants migrate between states in order to optimize their position on the fitness landscape. For example, a military force that optimizes its position on the fitness landscape is better able to survive and thrive because in that state it is better able to observe, orient, decide and act. Since this is a never ending process, the forces are always migrating along the fitness landscape from state to state, changing that landscape as they migrate. The force's path along that fitness landscape, in system-speak, is called its trajectory. |
|
5.3 |
Fitness landscapes have no objective reality separate from the autonomous agents that inhabit them. What is a fitness hill for a Somali tribesman may be a ditch for an Army Ranger. |
|
5.4 |
The fitness landscape is itself changed by our actions, since these actions impact the potentially available states and the level of fitness associated with each. It is continually dynamic and close coupled with us. Our competitors are also making decisions and this affects not just their fitness, but our fitness as well. For example, we can obtain air superiority in order to engage freely in air to ground attacks and think we are at the top of a fitness hill, only to have the adversary adapt by moving and hiding the desired targets so that their location is not precisely known. This flattens the fitness hill, essentially pulling it out from under us. In Stuart Kauffman's words: "…each coevolving partner chases peaks that move away from it faster than it can climb, each clambering forever uphill on deforming landscapes". <Note 6> Kauffman also describes stablility as a state in which each agent is better off just sitting on top of its respective hilltop so long as the other does the same. An example is the Cold War strategy of Mutually Assured Destruction. This guaranteed that each side stayed pegged to its own hilltop and put all its energy into ratcheting upwards the height of its own hill. This is so enduring and stable a strategic state, that even with the collapse of the Soviet Union, each side remains ensconced on its hilltop. |
|
5.5 |
Being internally focused means we spend all our time exploring the terrain of our local hill. Externally oriented means we build new connections that allow us to explore faraway hills and even jump clear across the landscape to a new distant hill. |
|
5.6 |
Recall that interconnections between autonomous agents (military units, in this case) are a control parameter in determining the number of available states. An increase in the number of interconnections can increase the number of states available. This influences the ability of each side in a conflict to take an "adaptive walk", that is to adapt to circumstances in a manner that enhances its position on the fitness landscape. But these interconnections can be a double-edged sword. Too many interconnections can actually be deleterious when each unit is so interconnected with others that it loses the ability to act independently. This interdependence causes agents to settle for a compromise position and are only able to climb the lower fitness peaks. |
|
5.7 |
Interactions of a particular type, called "canalyzing", actually make it more difficult to engage in an adaptive walk. These force the agent to a single fixed state, regardless of its other inputs. A single input can ripple through and lock up entire networks of interconnected agents. <Note 7> The effect is as if the entire network of agents is required to perform an adaptive walk up the same fitness peak. As a result, the fitness peak the agents are trying to climb becomes steeper. |
|
|
||
5.8 |
In contrast, if the agents (units) are too loosely interconnected they will tend to suboptimize. If individual agents selfishly optimize their position on the fitness landscape with little regard for other units, then their lack of coordination will result in a wildly fluctuating, uncoordinated fitness landscape for the group as a whole. |
6. |
Predictability |
6.1 |
Non-linear and chaotic systems are deterministic, but not necessarily predictable. determinism means that, given knowledge of an initial condition, the condition at some later time can be determined. This is the rule of cause and effect, where the system's output depends on and can be determined from the input. But the initial conditions cannot be known with infinite precision and there is always some small error in knowledge about that starting state. In most cases, it is assumed that the lack of precision in starting conditions will be reflected in the lack of precision in the later predicted condition. Doubling the accuracy of the measurement of the initial condition is assumed to double the accuracy of the final condition. Many non-linear systems do not obey this behavior. In these systems an almost infinitesimally small error in initial conditions will blow up to enormously large error in the predicted value of the final (or later) condition. |
6.2 |
Sensitivity to initial conditions means that, given two seemingly identical inputs to a system, as time goes by their two paths (trajectories) will start to diverge. But there is a period of time during which their respective trajectories lie very close to each other and within this range (prediction horizon) our ability to predict is relatively good. This prediction horizon may be on the order of seconds (a cat), days (weather) or years (planetary paths). This implies that any dependency of planning on our ability to predict outcomes is also dependent on our knowledge of the sensitivity in initial conditions and how quickly seemingly similar trajectories will diverge. |
6.3 |
If our inclination is to plan and operate within the prediction horizon then we are subjecting ourselves to vulnerability. If we operate within the prediction horizon for the sake of thinking we can be certain about the outcome, then the enemy can also predict our outcome and can adjust his actions accordingly. |
6.4 |
A plan is an attempt to predetermine the trajectory across the fitness landscape. It attempts to predetermine the sequence of states that the forces visit, as if the fitness landscape is known and unchanging. It presumes that the enemy and itself are so predictable that the trajectory can be figured out ahead of time, and forces simply directed to adhere to the plan. Planning branches and sequels similarly presumes the alternative states and trajectories can be pre-determined. But war is a real time system of transients with trajectories towards states (attractors) that are transient themselves. The typical compensation is adjustments to plans made on the basis of an update in situational awareness and modified directions based on the plan adjustment. But the time lag between the replan and the redirection fails to keep pace with the rate at which the fitness landscape changes. Every action changes its topology. |
6.5 |
If the adversary similarly uses plans as a basis for command and control, and if we act faster than his time to re-plan (that is, we operate inside his OODA loop), then his trajectory on fitness landscape becomes less and less optimal for survival, let alone conquest. Alternatively, if we ourselves doggedly pursue a plan that is not generating the desired response, then we might just as well have yanked our own hill on the fitness landscape out from under ourselves. |
6.6 |
Sun Tzu, in The Art of War, admonishes us to attack the enemy in his plan. This is viewed as clearly superior to attacking his forces in the field. Attacking him in his plan can occur by switching to a state where his plan is rendered so irrelevant, that no adjustment to his plan has any real positive result at all. Since we don't want to be predictable, this means we don't want our trajectory to be predicted. We do not want to stay in one state for very long and we want to continue to change states in such a manner that the next state can't be determined by any logical means. It has recently become fashionable for us to announce on worldwide television our "phased approach" to war. In this case, we not only select the overall sequence of states we will migrate through, but announce it and describe it to our adversaries ahead of time. Recent events indicate that the adversary is all too willing to take advantage of this sudden illumination. |
7. |
Stability versus Adaptation |
|
7.1 |
Nobel Laureate Murray Gell-Mann defines three levels of adaptation, which exist on three different time scales. <Note 8> These reflect the ability or inability to cope by changing (evolving) survival strategy in order to keep pace with change. He defines direct adaptation as that existing on a very short time scale, in which the organization reacts to changes in very specified ways. On a longer timescale, there is time in responding to events for one adaptation scheme to compete with and replace another. In the longest time scale, Darwinian processes occur. If the evolution of survival schemes is not adequate, the organizations may not survive and merely disappear. We can apply Gell-Mann's view to the case of responses to opposing fire in an urban environment. The first level, direct adaptation, would be exemplified by immediate reactions based on current drill-based training approaches. The second level would be the selection of new approaches for dealing with urban warfare, such as those efforts currently being explored by USMC Warfighting Experiments. The third level would occur as these are tried out in future real world urban engagements and continually evolved based on real experience. Failure to continually evolve these warfighting approaches to the special situations found in urban combat would then result in total failure of our forces to survive in that environment with concomitant political ramifications. |
|
7.2 |
With the Gell-Mann adaptation model in mind, we can examine U.S. Aerospace Doctrinal Stability. |
|
|
||
7.3 |
Cultural beliefs, not necessarily codified in doctrinal manuals, can also drive overall strategy. An example is the USAF's belief in victory through airpower. This view, first conceived in the 1920s in the theories of Billy Mitchell and Guilio Douhet, was expressed explicitly by De Seversky in his 1942 book by the same name. It expresses the belief that war can be won strictly though an aerial bombing campaign. As De Seversky put it, "…only through supreme air power can America attain the supreme victory…all else becomes a secondary subordinate, auxiliary operation…". <Note 10> |
|
7.4 |
The basic premise of this view is that the adversary will abandon its political objectives, given sufficient destruction of particular target sets. The primary debates within this cultural outlook center around what to bomb with candidates including munitions factories, population centers, the enemy field army, war materiel, transportation, communications, key economic nodes (industrial web), oil/transportation, etc., with the expected result also varying from an uprising and overthrow of the existing government by the disgruntled masses, to military and political submission, etc. <Note 11> |
|
|
||
7.5 |
From an adaptation perspective, the issue is not whether or not the existing doctrine is correct. The issue is why it has changed so little, why it is so mono-stable, given radical changes in the identity and nature of our adversaries. As we determined in Section 4, it is the control parameters that cause a system to bifurcate into multiple states, and the primary control parameter in war is orientation. It would then seem that the reason our aerospace warfighting doctrine is stuck in a mono-stable state is because our orientation is locked up. |
|
7.6 |
To get our orientation unstuck, we need to take in new inputs, and not force-fit them, but tear apart our existing orientation and synthesize another. Some camps advocate maneuver warfare in the place of attrition warfare. But to simply replace one alternative with another does not resolve the predicament. From an adaptation perspective what we are seeking is to make use of a multiplicity of approaches. Boyd's scheme incorporating all three forms of conflict - attrition, maneuver and moral - provides an adaptive, evolutionary approach. <Note 12> |
|
7.7 |
The Boydian approach tracks extremely well with the nonlinear dynamics of war. He advocates that we "Operate inside adversary's observation-orientation-decision-action loops to enmesh adversary in a world of uncertainty, doubt, mistrust, confusion, disorder, fear, panic, chaos,..and/or fold adversary back inside himself so that he cannot cope with events/efforts as they unfold." He refers to the Strategic Game as "A game in which we must be able to diminish adversary's ability to communicate or interact with his environment while sustaining or improving ours". He advocates that we "Deny adversary the opportunity to cope with events/efforts as they unfold". <Note 13> These all prevent the adversary from performing an adaptive walk across the fitness landscape. We pull his fitness hill out from under him and freeze him in place. He can still experiment, and may luck out, but he will very likely find himself at the bottom of a fitness trough. In this we do not merely adapt to the existing fitness landscape, but have changed the fitness landscape to our liking. |
|
7.8 |
In Boyd's view of maneuver warfare, we perform "irregular and rapid/abrupt shift from one maneuver event/state to another"…to…"Generate many non-cooperative centers of gravity, as well as disorient, disrupt, or overload those that adversary depends on, in order to magnify friction, shatter cohesion, produce paralysis, and bring about his collapse." In this we become unpredictable as we traverse the fitness landscape. Our continual and rapid execution of OODA loops provides the continual re-orientation that is the control parameter for being able to rapidly shift between states. At the same time, we deny the adversary the same ability by disrupting his interactions to create non-cooperative centers. With these non-cooperative centers, his fitness landscape becomes a set of widely fluctuating non-harmonious peaks for his organization as a whole. We disrupt his ability to execute his OODA loops, and without Orientation, he is unable to shift to more fit states. |
|
7.9 |
It is interesting to view Boyd's legacy to us in light of the role that new technology plays in our ability to wage war. It has become very vogue in some circles to invoke Boyd's OODA Loop as justification for new, superior technology to win "the information war". The idea is that we can be almost omniscient with regards to situational awareness, and become capable of replan and redirection at ever increasing speeds. From the perspective of the fitness landscape and our ability to perform adaptive walks, this does render the peaks less steep and once on a peak allows us to pull it up higher under us. On the other hand, that presumes that that peak is really the place to be. The advantages of new technology are only partially realized if all we are doing is doggedly staying at the top of the same fitness hill. But the real advantage in new technology can be gained if we use it as a way to jump across large distances of the fitness landscape from peak to peak without having to adaptively walk the entire landscape between. It should catapult us to a completely different set of states that provide not an incremental, but a quantum non-linear leap forward in our ability to wage war. |
ConclusionsStability and adaptability appear to be entirely antithetical. It would seem that we should simply abandon stability for the sake of adaptability. But this would negate the actual value of stability. Some degree of stability in doctrine provides a way of forming a common orientation among the forces. It provides a context in which strategy can be overlaid and a shared way of thinking. The real issue is whether our doctrine continues to adapt and evolve. In the Gell-Mann model of adaptation, evolution is the key to continued survival. Non-linear dynamics tells us that the path of evolution contains a multiplicity of branches, and that only some of these provide success. By measuring ourselves on the fitness landscape we can gauge which branches provide opportunity for adaptation and which do not. When we become stuck at a cross-roads or stuck in one state, then we have orientation as a control parameter to open up another series of branches. If our orientation is locked up then we need to consider how we are treating our inputs. The consequences of becoming fixated on a single line of thought are that we become predictable. In a competitive arena, predictability makes us vulnerable to the adversary and provides him an opportunity to negate our attempts to adapt. |
"Machines don't fight wars, people do, and they use their minds." Col John Boyd <Note 14> |
End Notes
Dr. Beckerman is Director of Systems Engineering for the ASSET Group of SAIC. The Group develops training and simulation systems for the military. Current ASSET programs include the Army's Close Combat Tactical Trainer (CCTT) and Warfighter's Simulation 2000, The USAF's National Air and Space Model (NASM), and the Joint Simulation System (JSIMS). For more information, see http://www.asset.com/orl |